工业机器人
查找满足您需求的机器人产品
阅读更多

工业机器人
查找满足您需求的机器人产品
阅读更多

活塞机器人
活塞机器人自动化清洗生产线
阅读更多
微课堂第二篇,工业机器人术语详解
作者: 捷米机器人/ 来源: 捷米/ 发布日期:2019-04-24 13:54
定位精度与标准循环时间
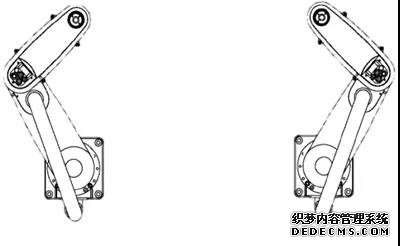
左手臂姿态 右手臂姿态
定位精度测量方法:分别以左手姿态、右手姿态运动到同一个点,测量两次运动停止后机械手末端的实际位置,比较两点之间的误差范围。这个误差范围就是定位精度。
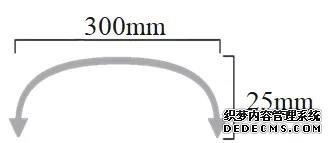
标准循环时间:用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
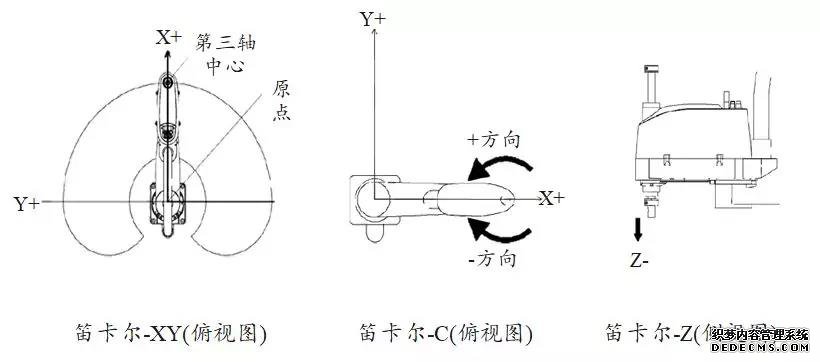
SCARA机器人坐标系
笛卡尔坐标
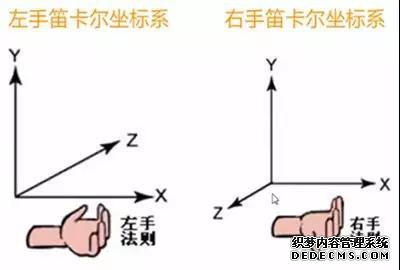
笛卡尔直角坐标系:两条数轴互相垂直的笛卡尔坐标系;包括左手笛卡尔坐标系和右手笛卡尔坐标系两种。LinkHou SCARA机器人笛卡尔直角坐标系遵循右手笛卡尔坐标系,以三维数据描述机器人末端在空间的位置
关节坐标
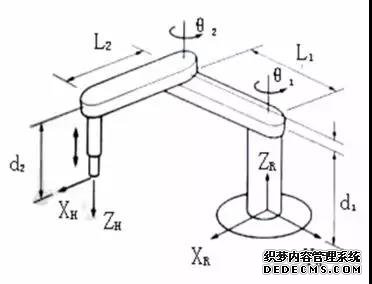
关节坐标系:每个轴相对原点位置的绝对角度。包含三个旋转关节
(J1,J2,J4,俯视逆时针旋转为正方向,顺时针负方向)和一个个移动关节(J3,测试上为正,下为负)。
世界坐标系
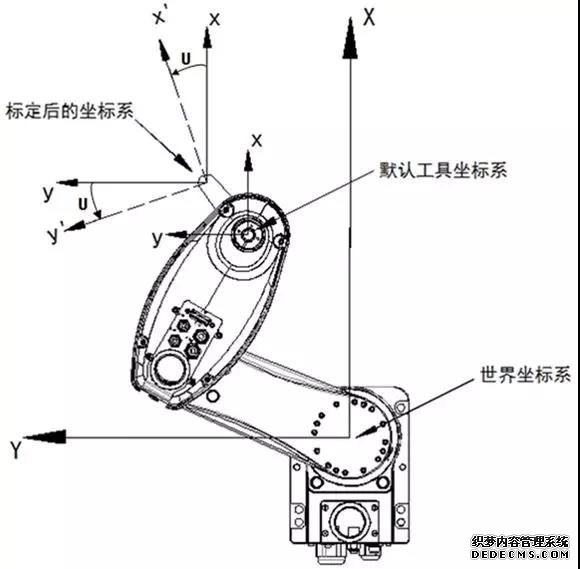
世界坐标系:以机器人基座水平中心为XY原点,Z原点处于基座最低端,依照右手定则建立xy-z三维坐标系统。
用户坐标系建立
一:手动添加用户坐标系
将已知的用户坐标系手动输入至相应的位置
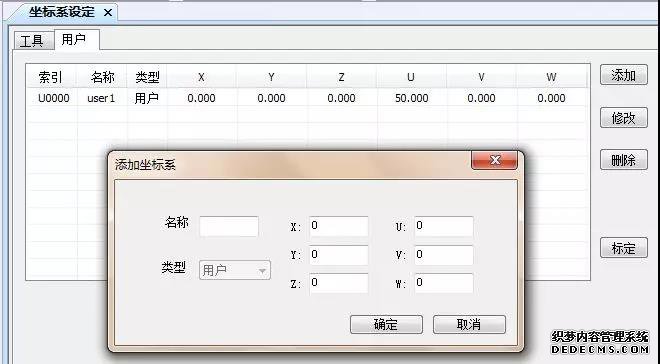
二:三点法标定用户坐标
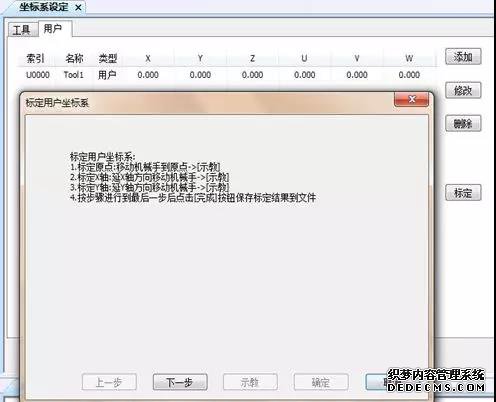
零点--标定
SCARA零点与真实零点的接近程度,影响机器人系统的定位精度,决定机器人应用范围。
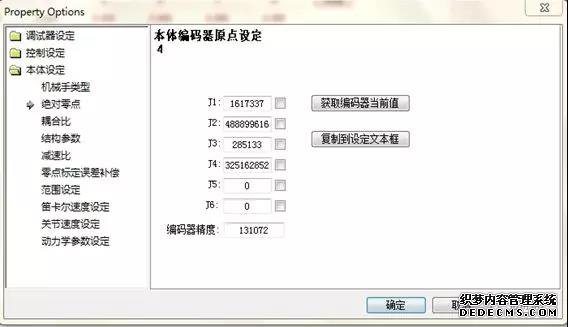
实施步骤
工具栏——项目——机械手设定——用户登录(密码:admin)——本体设定——绝对零点——将需要标零点的轴勾选上——获取编码器当前值——复制到当前文本框——应用——确定
机器人课堂 查看更多...
 科技发展趋势的观察者,CEF玩转最新热门...
科技发展趋势的观察者,CEF玩转最新热门...
打造工业互联网平台体系 工信部:培育一...
微课堂第二篇,工业机器人术语详解...
中国(华南)国际机器人与自动化展将于...
2019第十届北京国际汽车制造及工业装配博...
行业新闻 查看更多...
捷米机器人 | 新厂址正式开工建设,凝心...
捷米机器人 | 让高频淬火也走向自动化!...
捷米机器人 | 智能刀具柜能有效提高工作...
捷米机器人 | 2021年度总结会议圆满举行...
捷米机器人 | 用完善的技术支持竭诚为您...
研发中心:重庆市科学技术研究院
东区应用中心:上海市宝山区富联路858号6栋
西区应用中心:重庆市两江新区悦来JMI厂区
制造基地:邻水经开区城南工业园二区渝邻大道100号
电子邮箱:sales@jmi-robot.com